陈 荻 / CHEN Di
李卫正* / LI Wei-zheng
孔文丽 / KONG Wen-li
申世广 / SHEN Shi-guang
摘要:三维绿量是指树木树冠所占空间体积,对于森林来说,它可以比较简易地反映绿化实体的生态环境效益。以南京林业大学校园内乔、灌木为研究对象,使用小型固定翼无人机获取了校园高重叠度、高空间分辨率影像,利用差分GPS获取了厘米级精度的像控点,再借助于Pix4D无人机测绘图像处理软件,得到了研究区高精度正射影像。在此基础上,基于数字图像分割技术,提取了树木的位置和冠径,并且利用三维树形树冠体积公式,计算了不同树木的三维绿量,实现了校园范围内三维绿量的定量分析。
关键词:风景园林;三维绿量;校园绿地;空间分布;无人机遥感;GIS
Abstract: Three-dimensional green biomass refers to all the stems and leaves of plants growing volume of space occupied, and it can truly reflect the relative environmental benefits of green ecological entity. In this paper, with the Nanjing Forestry University campus trees, shrubs as the research object, this study used a small fixed-wing UAV and acquired campus images of high overlap degree and high spatial resolution using differential GPS centimeter-level accuracy of control points. Aided with Pix4D UAV mapping image processing software, the study area was present as the high accuracy orthophoto. On this basis, based on digital image segmentation technique, this study extracted the location of trees and crown diameter, and used three-dimensional tree crown volume formula to calculate the three-dimensional green biomass of different trees.Aquantitative analysis of campus-wide three-dimensional green biomass is achieved.
Key words: landscape architecture; three-dimensional green volume; campus green space; spatial distribution; UAV remote sensing; GIS
人们通常使用绿地率、绿化覆盖率、人均绿地面积等二维绿化指标来衡量一个地区绿化的基本状况。但是,这些指标只能从平面整体上描述区域内的绿化状况,无法从立体空间格局等方面来综合表达城市的生态环境和功能状况。20世纪90年代初,以叶面积为主要标志的绿量概念的提出,是对绿化指标的重要发展和完善。但是,如何获得单位面积上的叶面积是个难题。因此,在立地条件相似,忽略病虫害侵扰和人工修剪的干预,不考虑叶子的空间分布密度,不计算低矮灌木和地被植物的叶面积等情况下, 用树冠体积(三维绿量)来近似单位面积的叶面积,是一种简单和便于推广的方法。本文的三维绿量是指树木树冠所占的空间体积,也称为树冠绿量。三维绿量指标的提出打破原有二维局限性,以立体空间为载体,同时考虑植物类别和结构差异,对提高绿量评估的可操作性有一定意义。
目前,无人机(UAV或UAS)遥感技术在农业和林业方面获得国内外学者较多的关注和研究。德国格黑茨道夫(G. J. Grenzdorffer)分别用固定翼和降落伞无人机(Paraglider UAV)进行摄影测量试验,表明小型UAV可以成功获取高精度数据影像,无人机遥感技术在农业和林业领域发展潜力巨大。瑞士昆·奥利弗(O.Kung)等提出了一种小型无人机影像全自动处理方法,可以处理导航级别的无人机定位信息和消费级非测量型数码相机影像,并且能实现较高的制图精度,相较于传统制图方式更具有优势。国内李宇昊以北京朝阳森林公园为研究对象,将无人机应用于林业调查,完成了无人机影像数据与地面实测数据的对比、分析,探索论证了无人机在林业调查中的可行性。
近年来,国内外学者利用遥感技术研究植物三维绿量取得很多进展。陈自新通过判读航空像片,以平面量模拟立体量的方法,估算出每株树木的绿量。吕妙儿等用卫星遥感影像与航空相片结合的方法,分析出南京市绿量分布格局。周廷刚等以彩红外航空遥感影像为数据源,用图像分割方法建立了城市森林植被高度模型。刘常富用立体量推算立体量的方法估算沈阳市森林三维绿量。这些方法都需要高精度的遥感影像,而无人机遥感技术获取的遥感图像分辨率高、时效性强、数据采集成本较低,可弥补传统卫星遥感和普通航空摄影技术的缺陷。
笔者以南京林业大学校园绿地内的乔灌木为研究对象,低空无人机遥感系统拍摄的高分辨率影像为数据源,在此基础上进行校园树种识别分类和树木冠幅测量,再以“冠径—冠高”相关方程等为理论计算基础建立三维绿量计算模型,估算并分析单株植物的三维绿量。同时对校园不同功能区域的三维绿量分布特征做对比分析,实现了对校园主要绿化树种的定量分析,并评估其配置的合理性和可调性,为校园绿地绿化结构调整和校园绿地规划提供参考依据。
1 材料与方法
1.1 研究区概况
研究区位于江苏省南京市南京林业大学新庄校园。地理上属于华东地区,长江下游中部(31°13’-32°36’N,118°19’-119°24’E),气候类型属亚热带季风气候,冬季温和少雨、夏季高温多雨。校园坐落于山水秀丽的紫金山脚下、玄武湖畔,占地面积79.977hm2,绿地面积43万m2,绿化覆盖面积62.3万m2,绿地率达53.8%,绿化覆盖率达78%。校园内植物主要有91个科,245个属,603个种,其中正种546种,变型种12种,栽培变型种15种。优势树种主要有水杉、杂交马褂木、桂花、意杨、香樟、悬铃木、喜树、龙柏、垂柳等。
为研究方便,我们根据不同的使用功能,把校园绿地进行分区:A.教学区、B.学生生活区、C.运动区、D.校园主入口开放空间区、E.教工生活区、F.教研储备用地区、G.商业服务区(图1,G区占地面积较小,且与校园无紧密联系,不纳入此次研究范围内;F区处于建设施工阶段,亦不纳入)。
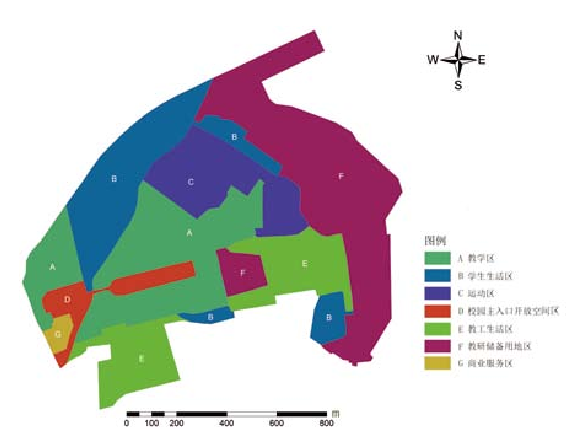
图1 研究区功能分区图
1.2 无人机影像数据获取与处理
1.2.1 影像的获取
使用小型固定翼无人机,翼展2.5m,机身长1.9m,使用排量为62cc(cc=cubic centimeter,即立方厘米)的汽油发动机,续航时间为2h,巡航速度为80~120km/h,搭载Canon EOS5D MarkII数码相机,镜头焦距35mm。通过自动驾驶仪控制航摄飞行,高度预设为270m,共设10条航线,航向重叠率为80%,旁向重叠率为60%。试验于2012年8月30日14:00进行,风力和能见度状况较好,且正值夏末季节,植被茂盛,成像质量较好,适合于三维绿量研究。获取到256张尺寸3744×5616像素的相片。
1.2.2 影像质量评估
对获取的航空影像进行质量评估,筛除成像质量较差相片,主要通过以下4种指标。
1)航高差:各航带之间的最大航高差及每条航带内的航高最大值与最小值之差,差值越大说明飞行高度越不稳定,影像几何变形较大,影响后续拼接工作。
2)影像重叠度。
航向重叠度:![]()
旁向重叠度:![]()
其中,LX、LY表示像幅的边长,PX、PY表示航向和旁向重叠影像部分的边长。
3)影像最大旋偏角:指一张影像上相邻主点连线与同方向框标连线间的夹角,连线间的夹角越大,航线的中心点偏离越大,影像越不适合参与多幅影像的拼接工作。
4)航带弯曲度:航带两端影像主点之间的直线距离L与偏离该直线最远的像主点到该直线垂直距离Q的比,采用百分数表示:
R% = (Q/L)×100%
航线弯曲度越小,说明一条航带拍摄影像中心点在同一直线上的几率越大。
通过计算以上4种影像质量评估的指标,本次试验各航带之间的最大航高差为10m,每条航带内的最大与最小值之差为6m,航摄实际航向重叠度平均为76%,旁向重叠度为50%。删除影像最大旋转角大于3°相片5张,这些相片位于航线转弯掉头处,并不连续。航带弯曲度为0.5%。因此,本次航摄251张相片质量较好,为后续拼接做好了准备。
1.2.3 地面像控点(GCP)的采集
通过RTK差分GPS(南方测绘S82)采集40个地面上具有明显特征的标志点,尽可能选在道路交通标志线交叉点、体育场地设施标志等易于识别的地方。同时,避免采用由于拍摄角度不同,变形严重的建筑屋顶或其他具有高程的物体。地面像控点在整幅图像内均匀分布(图2)。20个点参与空三运算,剩余20个点作为检查点,来衡量图像拼接处理的精度。GCP采用高斯—克里格投影,北京1954地理坐标系统。
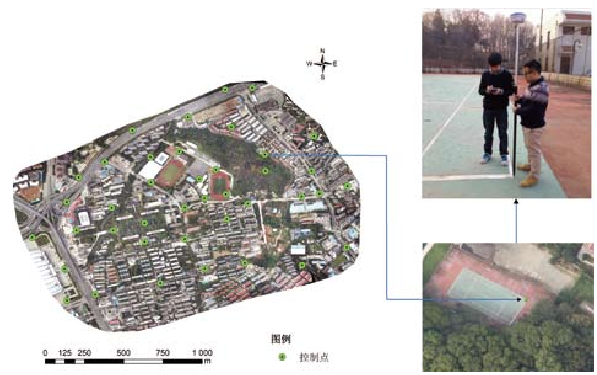
图2 研究区及周边控制点分布图
1.2.4 影像的拼接处理
无人机影像为多幅单张照片,需要对图像进行数字镶嵌处理,即图像间进行几何匹配和色调匹配。拼接工作采用瑞士Pix4D公司的Pix4UAV进行,先将无人机飞控数据导入Excel,编辑为Pix4UAV所能采用的格式。检查相片参数与照片名称是否对应后,导入Pix4UAV进行空三运算,软件自动生成带坐标的数字地表模型GSM和正射影像。生成的正射影像会出现一定程度的拉花,利用软件自带功能进行影像处理即可消除,并调节照片亮度和饱和度,增加整幅影像的协调感,最终获得适合于三维绿量估算的正射影像。
1.3 树种数据的获取与处理
以校园内乔、灌木为调查对象,利用前面处理好的高分辨率无人机正射影像,通过计算机视觉图像分割技术提取树冠直径。处理步骤:1)首先对整个正射影像进行分块处理;2)对每个小块图像分别使用ENVI Feature xtraction Module5.0进行图像分割处理,反复尝试参数直至把树木的树冠轮廓基本分割出来;3)分割结果导入ArcGIS中合并,对每个树冠轮廓polygon设置属性信息,建立树木地理信息数据库;4)将树冠多边形的中心作为树木的位置,生成X、Y地理坐标;5)在对每株树木地理坐标定位基础上,进行地面调查,核实、确认树木树种和数量;6)对每株树冠径测量采用南北2个方向取平均值。经地面调查确认,校园内研究区共有5185株乔灌木,共计279种。其中,常见的66种。有三维绿量计算方程的32种,3801株,占全部树木的73.3%;可以采用相似计算方程代替的树种有29种,目测5种,计760株,占14.7%;这2部分占到调查总数的88%。剩余的624株;采用前面两部分的树木三维平均绿量值来代替进行估算。
1.3.1 三维绿量理论基础(“冠径—冠高”相关方程)
本研究“平面量模拟立面量”的模型来自周坚华等的研究。在他们的研究中发现对于某一树种,其冠幅与冠高存在着一定的统计相关关系,通过回归分析建立相关方程,根据冠幅求出冠高,从而求得树木的树冠体积,此相关方程称为“冠径—冠高”相关方程。该方程是通过对经典的Logistic方程进行修正后获取的更精确的方程。
周坚华认为不同树种以及同一树种在不同生长阶段,其冠径与冠高的关系也不相同,因此其相关关系会呈现曲线的发展模式,建立了修正后的Logistic曲线方程,使其普遍适用于大多数植物的生长规律,其一般形式为![]() : ,式中X为冠径,Y为冠高,b为回归系数,a、c为系数。如进行变量替换,令:X=e-CX,Y=1/y ,则可为Y=a+bX,此时,可按常规线性回归方法求取系数a,b。系数c则以零为初值,以一定步长向正方向取值进行迭代计算。每迭代一次,计算和比较一次相关系数r,当r达到峰值并开始回落,则终止迭代,并以r的峰值对应的c值为最佳值,由该c值参与回归计算系数b。加入了c值后可以更准确地反应不同生长状态下树木的冠径和冠高的关系。通过与原始的Logistic曲线方程比较分析,拟合精度要比之前高得多,相关系数r平均提高17.9%。因此,本文将这修正后的方程引用为原型,基于“平面量模拟立面量的方法”估算校园绿地的三维绿量,正射无人机高分辨率影像为其直接的数据来源。
: ,式中X为冠径,Y为冠高,b为回归系数,a、c为系数。如进行变量替换,令:X=e-CX,Y=1/y ,则可为Y=a+bX,此时,可按常规线性回归方法求取系数a,b。系数c则以零为初值,以一定步长向正方向取值进行迭代计算。每迭代一次,计算和比较一次相关系数r,当r达到峰值并开始回落,则终止迭代,并以r的峰值对应的c值为最佳值,由该c值参与回归计算系数b。加入了c值后可以更准确地反应不同生长状态下树木的冠径和冠高的关系。通过与原始的Logistic曲线方程比较分析,拟合精度要比之前高得多,相关系数r平均提高17.9%。因此,本文将这修正后的方程引用为原型,基于“平面量模拟立面量的方法”估算校园绿地的三维绿量,正射无人机高分辨率影像为其直接的数据来源。
1.3.2 三维绿量计算方程的建立
分树种选配与树冠形态相似的立体几何体,依体积计算公式求得树冠部分的体积,即树种三维绿量,这种情况适合大部分树木。1)对于数量较多的32种特定树种,分别是白玉兰、薄壳山核桃、垂柳、枫杨、鸡爪槭、龙柏、泡桐、桃树、乌桕、银杏、樱花、紫薇、桂花、蜡梅、石榴、紫荆、夹竹桃、八角金盘、喜树、香樟、悬铃木、马褂木、雪松、榉树、紫叶李、黄山栾树、意杨、水杉、国槐、广玉兰、女贞、枫香,利用文献成果,计算树冠高度。2)对于无法利用现有文献成果的29种树种:侧柏,杜英、构树、拐枣、海棠、椤木石楠、栓皮栎、木瓜、培忠杉、枇杷、七叶树、青桐、柿树、落羽杉、浙江桂、白兰花、旱柳、三角枫、青钱柳、五角枫、榆树、朴树、圆柏、重阳木、晚樱、紫花泡桐、樟叶槭、无患子、棕榈,则按其树冠形状和叶表面形态选择近似树种方程代替。29种树种替代情况如下,杜英、浙江桂、白兰花采用白玉兰的方程;拐枣、三角枫、五角枫采用枫香的程;海棠、木瓜采用紫叶李的方程;椤木石楠采用桂花的方程;栓皮栎、青钱柳采用枫杨的方程;培忠杉、落羽杉采用水杉的方程;枇杷树、柿树采用广玉兰的方程;七叶树采用薄壳山核桃的方程;青桐、紫花泡桐采用泡桐的方程;旱柳采用垂柳的方程;榆树、朴树采用榉树的方程;圆柏采用龙柏的方程;重阳木采用乌桕的方程;晚樱采用樱花的方程;樟叶槭采用樟树的方程;无患子采用黄山栾树的方程,对于侧柏、构树和棕榈则采用武汉市常见树种的“冠径—冠高”方程。3)对于树冠形态没有相似的树种,合欢、黄金梓树、罗汉松、糯米椴、桑树、常青白蜡、黑松,采用实地测量方式获取树冠高度,再根据树冠体积公式计算体积。结合现场调研和文献资料,将常见树种按照树冠形态可分为以下几类,即树冠卵形、树冠圆锥形、树冠球形、树冠半球形、树冠球扇形、树冠球缺形、树冠圆柱形,根据以上分类及其相对应的公式可以对植物的三维绿量进行估算。
2 结果与分析
2.1 校园绿地无人机正射影像的精度
利用采集的像控点进行区域网空三平差,生成研究区域正射影像如图3所示。影像色彩自然,树木轮廓清晰可见,相比于常规的高清晰卫片和航片,无人机图像空间分辨率较高。进一步计算得出整个研究区域的正射影像空间分辨率为0.059m。影像精度:X方向的平均误差为0.055m,标准差为0.049;Y方向平均误差为0.070m,标准差为0.052;Z方向平均误差为0.164m,标准差为0.142。
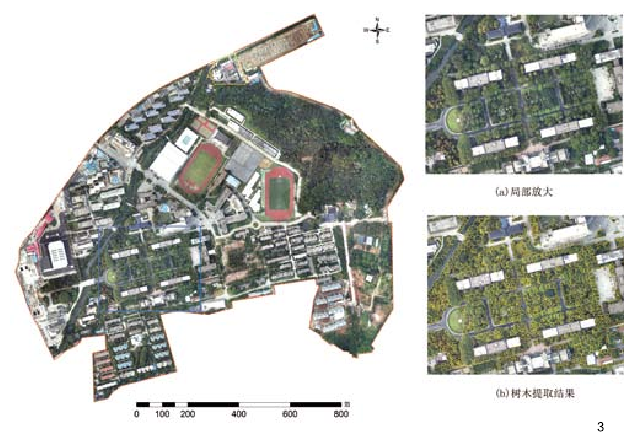
图3 研究区正射影像图与树木提取图
2.2 校园三维绿量空间分布特征
根据校园功能分区及树木树冠外轮廓所在位置,分别计算出不同分区内的树种、植株数、冠径、绿地覆盖面积等指标。进一步根据单株植物三维绿量,得出总三维绿量,各主要功能区内的三维绿量和分布见表1与图4。

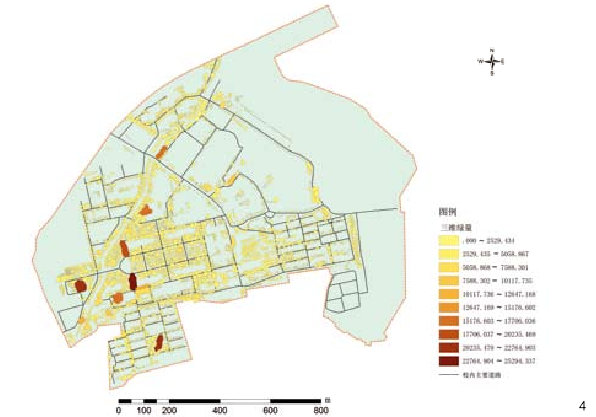
图4 校园三维绿量分布图
由表1与图4可知,在校园总体三维绿量中,教学区三维绿量为618355.263m3,占40.61%,所占比重最大。植物种类丰富,有120种。这一分区是整个学校的核心区域,是师生教学的重要场所,丰富的树木种类及数量有利于为师生提供舒适安静的学习环境,营造理性、生态、宽敞的教学空间。同时,该区域也为本科生植物教学提供了便利的实习基地。入口开放空间区三维绿量为212 489.449m3,所占比例为13.96%,该区注重校园文化的展示,植物组景突出春花秋色夏荫冬韵的季相变化,水杉、悬铃木、柏木等大乔木的种植使得校园历史底蕴浓厚,符合校园入口景观的别致性,林下适当设置游憩场地,使得游赏空间更加丰富。学生生活区总体三维绿量为288 984.520m3,所占比例为18.98%,在三大主要功能区中,树木种类较少,为41种。该区域为在校学生大多数时间生活区域,区域内建筑以学生宿舍和食堂为主,植物配置密度较低,且层次不够丰富,观花、观叶小乔为该区域三维绿量的主要来源。运动区以开敞空间为主,植物种类相对少,为27种,采用高大乔木、耐阴灌木和地被植物的复合型植物群落,总三维绿量为129 034.916m3,可以有效起到隔音和滞尘效果,同时减少该区对外界的干扰。教职工生活区建筑密度大,植物种类较丰富,达77种,大乔木数量少,植物造景具有组团特色。综上所述,校园内整体三维绿量的分布与各功能区本身特点是匹配适应的。
3 结语
1)本研究使用小型固定翼无人机获取了校园高重叠度、高空间分辨率影像,利用差分GPS获取了厘米级精度的像控点。借助于计算机视觉领域的优秀成果Pix4D无人机测绘图像处理软件,得到了研究区高精度正射影像。在此基础上,基于数字图像分割技术,提取了树木的位置和冠径,并且利用三维树形树冠体积公式,计算了不同树木的三维绿量,实现了校园范围内三维绿量的定量分析。
2)在校园总体三维绿量中,教学区三维绿量所占比重最大,达618 355.263m3,占总绿量的40.61%。其次学生生活区和入口开放空间区,校园内整体三维绿量的分布与各功能区本身特点是适应协调的。
3)由于试验区域植物茂盛,生态系统层次多样,存在上层高大茂密乔木遮挡下层树木的情况,因此,植物树种确认核实时采取实地调查方法,工作量较大,人工误差难免。此外,许多小众树种没有相应的计算公式,需要后续探索这些树种的计算方法。本文方法对于同样树冠体积的不同树种,由于叶面积指数的差异,它们三维绿量虽然相同,但是其生态意义却可能相差较大,也是今后三维绿量在具体“量化”方面值得研究和改进的方面。此外,还应增加低矮灌木和地被植物的绿量计算方法,以进一步逼近绿量的真实情况。虽然使用高分辨率影像提取到了树木的位置、冠径,但不能完全利用计算机技术自动取得所有数据后续研究可以联合应用无人机机载三维激光雷达、机载高光谱仪,提高定位和树种识别的精度,减轻地面工作量。
致谢:感谢南京林业大学芦建国教授、杨秀莲副教授、陈昕副教授在植物识别中的指导和帮助;李国芬教授、魏浩瀚副教授在测绘校园控制点中给予的技术协助;北京望神州科技公司无人机影像处理技术的协助;何鹏、陈逸帆、周意等同学的校园植物调查工作。
作者简介:
陈 荻/1991年生/男/江苏南京人/同济大学风景园林学在读硕士研究生/研究方向为风景园林规划设计(上海 200092)
李卫正/1978年生/男/山西静乐人/博士/南京林业大学现代分析测试中心讲师/研究方向为3S技术与数字景观(南京 210037)
孔文丽/1988年生/女/安徽庐江人/硕士/北京拾图景观设计有限公司/研究方向为风景园林规划设计(北京 100025)
申世广/1976年生/男/山东曹县人/博士/南京林业大学风景园林学院副教授/研究方向为城乡规划与设计(南京 210037)
 《中国园林》2015第9期导读
《中国园林》2015第9期导读
Leave a Reply